MOMENTA REACHES STRATEGIC COOPERATION WITH TOYOTA TO PROVIDE HD MAPPING-RELATED AUTONOMOUS DRIVING TECHNOLOGIES IN CHINA
Momenta has officially announced strategic cooperation with Toyota to provide automated HD mapping and updates through vision-based technologies. With this joint development, both companies aim to promote the commercialization of Toyota’s Automated Mapping Platform (AMP) in the China market to better serve Chinese customers.
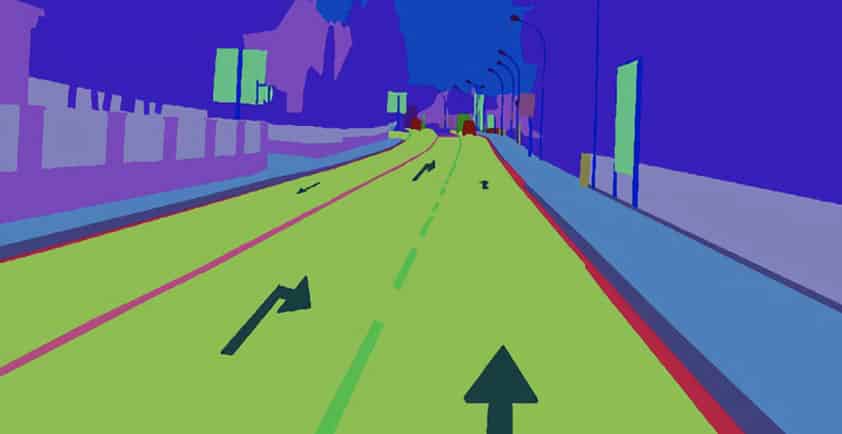
Momenta's vision-based (camera-based) HD mapping uses low-cost consumer-grade sensor sets, which consist of camera, GPS, and IMU to automatically generate HD maps with 10cm level relative accuracy by using cutting-edge technologies such as deep-learning based perception, SLAM (simultaneous localization and mapping), etc. Momenta's HD map not only includes rich geometry features, such as traffic signs, poles, lane borders, traffic lights, road markings, but also generates road level & lane level topology and semantic features. This technology has generalization capability of various devices, hence available for large-scale cost-effective commercial applications. By processing big data through automated mapping pipeline, the HD map can be updated with high frequency, thus provides a "live", reliable map for different autonomous driving modules such as localization, planning and control.
Momenta and Toyota's cooperation will make the best of two companies' strengths. Momenta's strategy is to pursue both mass-production passenger vehicles and full autonomy for mobility service vehicles. We are confident that the cooperation with Toyota will play an important role in this strategy.
About Momenta
Momenta builds the “brain” for autonomous driving. Its deep-learning based software in perception, HD Map, and data-driven path planning enables the realization of full autonomy. Momenta pursues a two-leg strategy of autonomous driving for mass-production passenger vehicles and full autonomy for mobility service vehicles. Data, data-driven algorithms, and closed-loop automation are the key to achieving autonomous driving at scale, and eventually the realization of full autonomy.