Gaining speed
While our robotaxi can reach 75 mph, we started out driving routes with limits of 35 mph last year and are now driving routes with a higher limit of 45 mph. Driving autonomously at a higher speed increases difficulty in all conditions. We’ve set rigorous internal safety targets, and we did not begin driving these routes until we were able to quantify that we have met and consistently exceeded those targets.
Our perception team had to overcome the challenge of reliable long-range detections when making unprotected turns onto high-speed roads. And to navigate the new geofence, we had to tackle lane changes, which require the AI stack to simultaneously plan the trajectory in space and time.
Moment-by-moment, the vehicle can adjust its behavior accordingly because the vehicle’s Prediction and Planner systems are working together.
"A big advancement in our AI stack is that Planner and Prediction work hand in hand."
MARC WIMMERSHOFF, VP OF AUTONOMY SOFTWARE
Come rain or shine
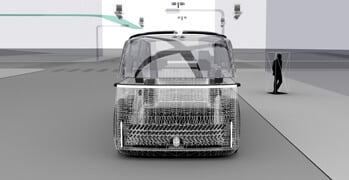
Rain can be tricky for AVs as it could create a distraction. Our Lidar system, for example, may pick up reflections from droplets and puddles. So we had to make sure our vehicle’s Perception system was robust to such lidar distractors.
Our AI also applies what it has learned from our test fleet that’s driving autonomously in rainy Seattle, cross-correlating it with our rain data from Las Vegas and Foster City. By having data from multiple geofences, we’re set up to grow our capabilities even more.