INSIDE APOLLO 6.0: A ROAD TOWARDS FULLY DRIVERLESS TECHNOLOGY
Since Baidu’s autonomous driving platform Apollo was open-sourced in April 2017, it has built a community with over 45,000 developers, 210 industry partners, and compiled more than 600,000 source code lines in 97 countries around the world.
At Baidu World 2020, Baidu’s biggest annual tech conference in September, we introduced Apollo 6.0, the newest version that demonstrates our efforts towards driverless technology. Join us for a quick look at Apollo 6.0, with new updates in deep learning models, data pipeline services, remote control interface, upgraded dev environment, and V2X capabilities.


Apollo 6.0 roadmap
New deep learning models
Apollo 6.0 incorporates new deep learning models to enhance the capabilities for certain Apollo modules, including:
Perception: PointPillars model for object detection from LiDAR point clouds data, optimized by TensorRT;
Prediction: Semantic map based pedestrian prediction model to better fit the pedestrian behavior in the environment;
Planning: Learning-based trajectory planning model to imitate driver behaviors in side-passing slow-moving obstacles
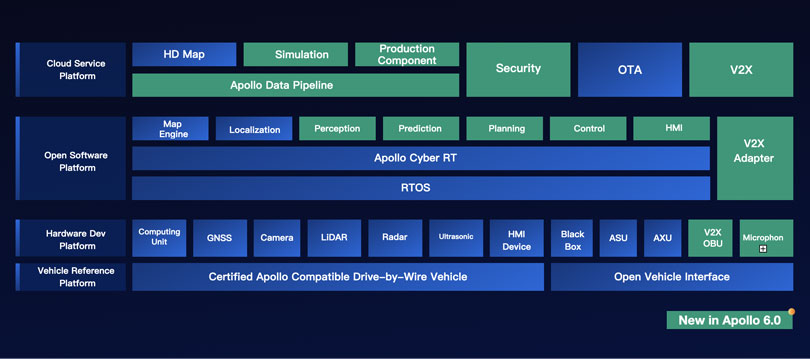

Apollo 6.0 architecture
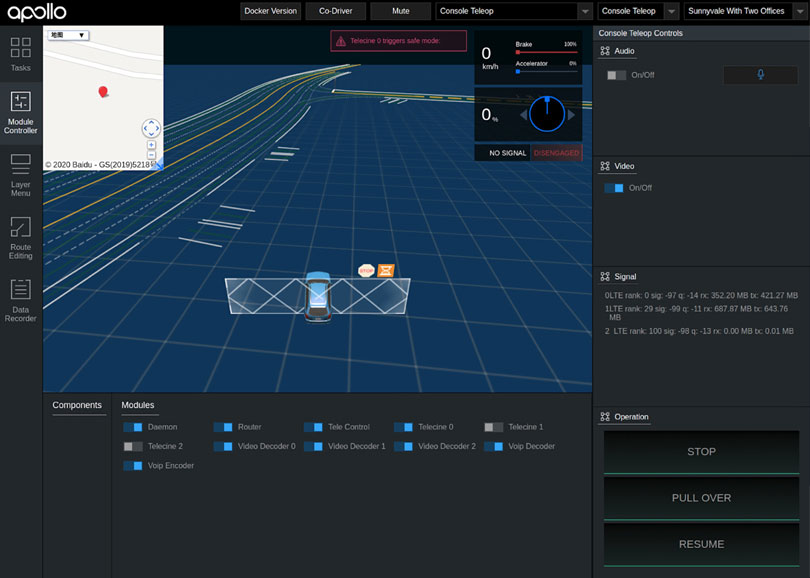
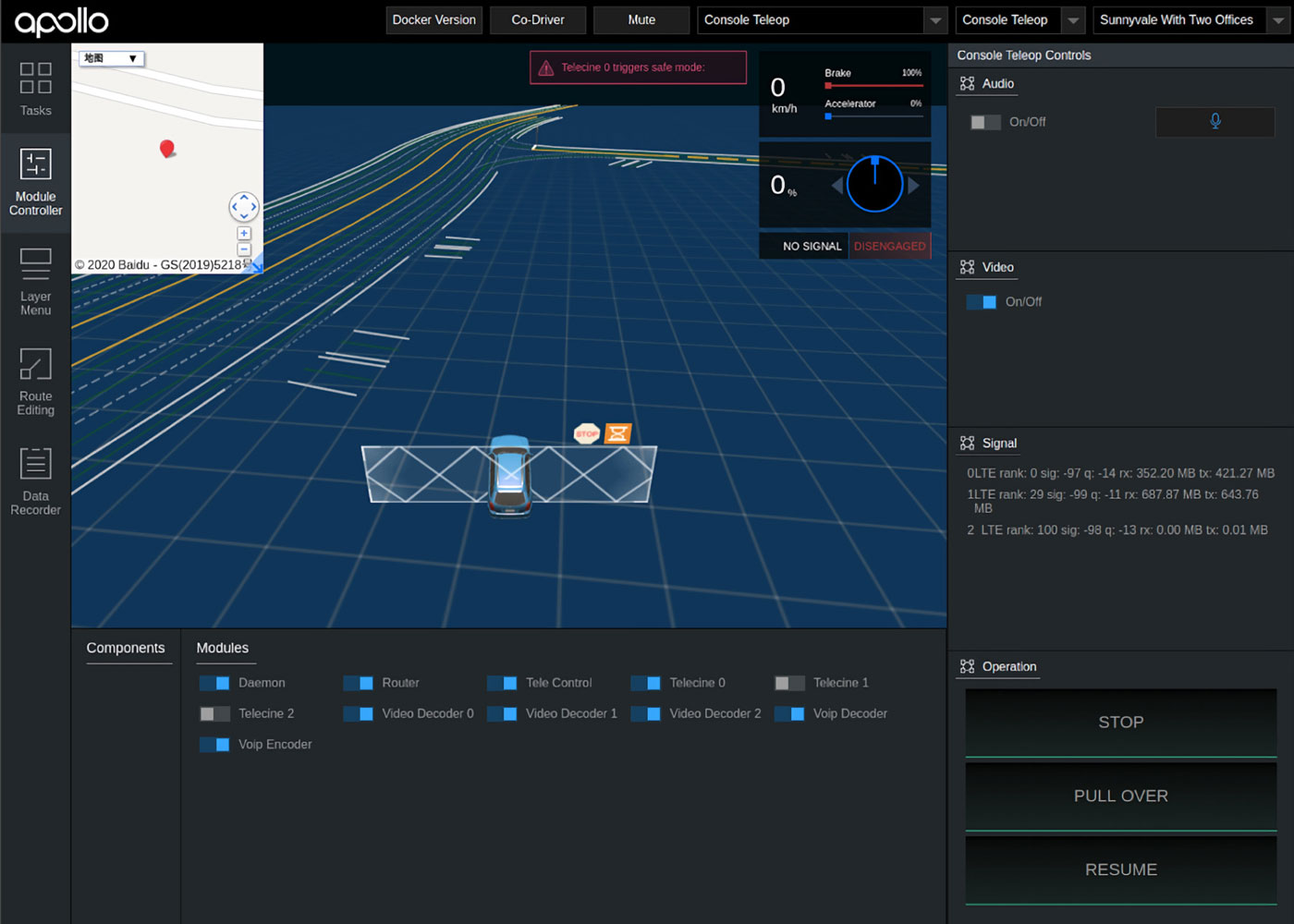
Teleoperation
Apollo 6.0 provides a teleoperation interface with DreamView integration. It defines some interfaces for data transmission so that users can design and implement their own audio/video streaming and network modules as long as it conforms to the interfaces.
Apollo 6.0 also adds an audio-based emergency vehicle detection system, which uses a deep learning method to detect emergency vehicles with a 95%+ accuracy in the selected dataset. The system is also able to recognize the location of emergency vehicles and whether they are approaching or driving further away.
Upgraded dev environment
One of the major upgrades in Apollo 6.0 is the development environment with build and dependency updates, in an effort to stay up with the industrial and academic trends and boost the performance of Apollo’s algorithms. The system now supports C++14, upgrades from Python 2.7 to Python 3.6, and uses Bazel 3.4 and GCC 7.5 to build the system. Major dependent libraries such as PCL TensorTR, PyTorch, and others, have also been fully upgraded.
New data pipeline services
The data pipeline services released in Apollo 5.0 have been well-received by developers. In Apollo 6.0, we have tailored services to the needs of developers with several improvements.
First, we integrate the data pipeline with the simulation platform so developers can seamlessly access different services within the same interface.
Second, Apollo 6.0 adds multiple new services, including:
> Low-speed obstacle prediction model training service with semantic map support
> PointPillars-based obstacle detection model training service
> Control profiling service
> Vehicle dynamic model training service
> Open space planner profiling service
> Complete control parameter auto-tune service
Most importantly, Apollo 6.0 connects different cloud services so that developers can handle complicated tasks on the cloud.
V2X capabilities
Apollo’s vehicle-to-everything technology (V2X) underwent a major upgrade since its first release in Apollo 3.5. The new V2X software can integrate object-level perception information from roadside and vehicles. Apollo 6.0 also open sources the new development toolkit, D-KIT, equipped with onboarding units to lower the V2X development threshold.
A look back upon Apollo’s milestones
Other Baidu World 2020 announcements included Apollo’s fifth-generation autonomous driving kit and the first pre-installed and mass-produced vehicles that meet the requirements for fully automated operations. These updates will be launching soon. With each new generation of Apollo vehicles, the cost has decreased by half, while performance increases tenfold.
When Baidu began autonomous driving research and development in 2013, Baidu engineers rolled up their sleeves and assembled the first prototype autonomous vehicle equipped with LiDAR and GPS devices from scratch. This vehicle was named “Xiao Hong” (little red).


This laid a great foundation and was beneficial in creating the second-gen autonomous driving kit in 2015, which included multi-fusion sensors and better designs. The new-gen kit, which featured better component integration and water-resistance, could be equipped on multiple vehicle models like Chery eQ, BYD Qin, and BAIC EU260.
In 2017, Apollo designed and deployed the third-gen autonomous driving kit on a large scale. It marked a milestone as Apollo began developing computing platforms and installed LiDARs, cameras, and millimeter-wave radars.
In 2019, Baidu partnered with FAW Hongqi to develop China’s first preinstalled L4 autonomous driving vehicles known as Hongqi EV. The vehicle was equipped with Baidu’s fourth-gen autonomous driving kit. It was completed through a synergy of leading software and hardware capabilities, preinstallation production capacity, fluid human-vehicle interface, a safety guarantee, and the multifaceted upgrade and optimization of fleet management via the cloud.
Today, Baidu Apollo is the world’s largest autonomous open driving platform. The Apollo fleet includes around 500 autonomous driving vehicles that have driven over 6 million kilometers and safely carried more than 100,000 passengers. Apollo now holds over 150 autonomous driving road test licenses and more than 1,800 intelligent driving patents globally.