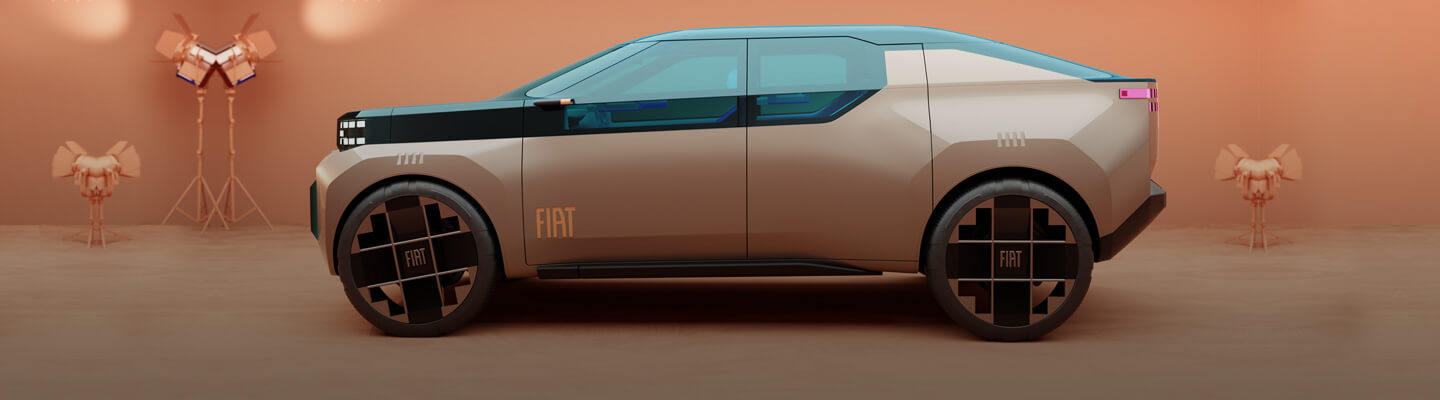
FIAT’S NEW GLOBAL GAME RENAULT 5 E-TECH ELECTRIC CHRYSLER HALCYON CONCEPT PUSHES INNOVATIVE BOUNDARIES MACAN SETS NEW STANDARDS: THE FIRST ALL-ELECTRIC SUV FROM PORSCHE XIAOMI UNVEILS FIVE CORE AUTOMOTIVE TECHNOLOGIES AND DEBUTS SU7 Previous Next SPOTLIGHT NEWS ARM AND NURO PARTNER TO DELIVER AI-FIRST AUTONOMOUS TECHNOLOGY FOR COMMERCIAL SCALE Arm Holdings plc, the global semiconductor design and software ... BOSCH TEAMS UP WITH MICROSOFT TO EXPLORE NEW FRONTIERS WITH GENERATIVE AI It’s a scenario that no driver ever wants to see: a ball rolling out into the road. THE ALL-NEW ZEEKR 001 IS NOW COMING Three years ago, the Zeekr 001 pure electric shooting brake vehicle excited the industry with great design, ultra-performance, extreme comfort and ... GM EXPANDS SUPER CRUISE NETWORK TO 750,000 HANDS-FREE MILES Being a leader in hands-free driving can’t happen by standing still, and winning over more happy customers means ... SPOTLIGHT NEWS FIAT’S NEW GLOBAL GAME In a constantly changing global mobility market, there are those who dream about a better future .. >> Arm and Nuro partner to deliver AI-first .. >> Bosch teams up with Microsoft to explore .. >> The all-new Zeekr 001 is now coming .. >> GM expands super cruise network to .. LI AUTO MEGA LANCIA YPSILON PININFARINA YANGWANG U9 HARMAN HIGHLIGHTS CONNECTIVITY INNOVATION WITH LATEST ROAD-READY PRODUCTS SHOWCASED AT MWC 2024 Robust connectivity lineup, including new industry-leading partners ... WORLD PREMIERE OF THE ID.7 TOURER FROM VOLKSWAGEN The ID.7 is the flagship among electric Volkswagen models – a progressive fastback saloon with a long range. DS AUTOMOBILES INCLUDES CHATGPT AS STANDARD SoundHound AI, Inc. , a global leader in voice artificial intelligence, today announced that its voice assistant with integrated ChatGPT ... ROBOSENSE'S M PLATFORM SENSORS POWER THE FULLY-ELECTRIC LOTUS EMEYA RoboSense, a global leader in LiDAR and perception solutions, announced that Lotus, a UK-headquartered global ... IMPACT HAS STARTED — LIGHTYEAR 0 HAS GONE INTO PRODUCTION >> Harman highlights connectivity innovation .. >> World premiere of the ID.7 tourer from .. >> DS automobiles becomes the first carmaker .. >> Robosense's m platform sensors power .. RENAULT 5 E-TECH CHRYSLER HALCYON CONCEPT PORSCHE MACAN XIAOMI SU7 O.E.M SUPERSTARS TECH ALL-STARS SUPERSTAR STARTUPS RIVIAN INTRODUCES R2, R3, AND R3X BUILT ON NEW MIDSIZE PLATFORM Rivian today unveiled its new midsize platform which underpins R2 and R3 product lines. APPTRONIK AND MERCEDES-BENZ ENTER COMMERCIAL AGREEMENT The partnership represents Apptronik’s first publicly announced commercial deployment .. BREATHE AND VOLVO CARS PARTNER TO BRING AGS TO NEW GENERATION EVS By integrating our software in Volvo Cars’ in-house developed battery management platform to .. POLESTAR 3 SHOWCASES LATEST IN-CAR TECH AT NVIDIA GTC Having recently surpassed the valuation of all but one of the tech titans that make up MAMAA, .. SUPERSTAR STARTUPS RIVIAN INTRODUCES R2, R3, AND R3X BUILT ON NEW MIDSIZE PLATFORM Rivian today unveiled its new midsize platform which underpins R2 and R3 product lines. >> Apptronik and Mercedes-Benz enter commercial .. >> Breathe and Volvo Cars partner to bring .. >> Polestar 3 showcases latest in-car tech .. NURO WAYMO ZOOX HESAI INVESTMENT IN U.S. BASED MAY MOBILITY Tokyo Century Corporation has invested in May Mobility, Inc., a U.S.-based company that develops autonomous vehicle technology, .. STELLANTIS VENTURES INVESTS IN STEERLIGHT Stellantis Ventures, today announced it has invested in SteerLight, the developer of a new generation of high-performance LiDAR .. LENOVO AND WERIDE FORGE A PARTNERSHIP TO ACCELERATE AD The cutting-edge intelligent-driving solution developed by Lenovo Vehicle Computing and WeRide is .. DEEPROUTE.AI UNVEILS END-TO-END SMART-DRIVING ARCHITECTURE DeepRoute.ai has announced plans to develop end-to-end smart driving solutions powered by .. IMPACT HAS STARTED — LIGHTYEAR 0 HAS GONE INTO PRODUCTION >> Investment in U.S. based May Mobility .. >> Stellantis Ventures invests in Steerlight .. >> Lenovo vehicle computing and WeRide forge .. >> Deeproute.ai unveils end-to-end smart .. TIER IV STOREDOT OXA AURORA CES 2024 ROUND-UP XPENG AEROHT ANNOUNCES LAUNCH OF THE FIRST MODULAR FLYING CAR TO BE MASS PRODUCED XPENG AEROHT, the largest flying car company in Asia, is delighted to announce .. HONDA DEBUTS NEW GLOBAL "HONDA 0" EV SERIES WITH TWO NEW CONCEPT MODELS Honda today announced the "Honda 0 Series," a new global EV series launching .. QUALCOMM USHERS IN A NEW ERA OF MOBILITY AT CES 2024 Today at CES 2024, Qualcomm Technologies, Inc. underscored global momentum and its leading position as the .. KIA LAUNCHES PLATFORM BEYOND VEHICLE BUSINESS TO GO 'BEYOND MOBILITY' Kia has revealed its Platform Beyond Vehicle (PBV) future strategy at CES 2024 in Las Vegas. Kia’s PBV business will .. CES 2024 ROUNDUP XPENG AEROHT ANNOUNCES LAUNCH OF THE FIRST MODULAR FLYING CAR TO BE MASS PRODUCED SPECIFICALLY FOR INDIVIDUALS XPENG AEROHT, the largest flying car company in .. >> Honda debuts new global "Honda 0" EV series .. >> Qualcomm ushers in a new era of mobility .. >> KIA launches platform beyond vehicle business .. MOBILEYE VOLKSWAGEN HARMAN BLACKBERRY QNX CONTINENTAL INTEGRATES FACE AUTHENTICATION INVISIBLY BEHIND DRIVER DISPLAY CONSOLE Continental presents the "Face Authentication Display," a two-stage access .. INTEL DRIVES ‘AI EVERYWHERE’ INTO AUTOMOTIVE MARKET Today at CES, Intel announced plans to drive the company’s AI everywhere strategy into the automotive market .. IMPACT HAS STARTED — LIGHTYEAR 0 HAS GONE INTO PRODUCTION MERCEDES-BENZ SHOWCASES CLASS-DEFINING DIGITAL TECH At CES 2024, Mercedes-Benz is pushing forward with an exciting range of digital advancements set to transform .. LOTUS EMEYA NAVIGATES WITH PRECISE MAPPING AND ADVANCED EV SERVICES FROM HERE' HERE provides Lotus Emeya with a comprehensive navigation experience .. >> Continental integrates face authentication .. >> Intel drives ‘ai everywhere’ into automotive .. >> Mercedes-Benz showcases class-defining digital .. >> Lotus Emeya navigates with precise mapping .. INNOVIZ AFEELA ANDROID AUTO LUMINAR ELEKTROBIT'S 360° OFFERING FOR SOFTWARE-DEFINED MOBILITY At CES 2024, Elektrobit showcases its 360° offering for software-defined vehicle (SDV) enablement, from .. ROBOSENSE ANNOUNCES NEW M PLATFORM LIDAR SENSORS The cutting-edge M2 and M3 deliver increased range, resolution, and cost effectiveness to advance intelligent .. IMPACT HAS STARTED — LIGHTYEAR 0 HAS GONE INTO PRODUCTION AEVA INTRODUCES ATLAS – THE FIRST AUTOMOTIVE-GRADE 4D LIDAR SENSOR Powered by New Aeva Silicon Innovations Including CoreVision Next-gen Lidar-on-Chip Technology and Aeva X1 .. HESAI ANNOUNCES TWO REVOLUTIONARY NEW ADAS LIDAR PRODUCTS Introduce the world's most advanced, highest performance ADAS lidar, Hesai AT512, boasting the industry's longest .. >> Elektrobit's 360° offering for software-defined .. >> Robosense announces new M platform lidar .. >> Aeva introduces Atlas – the first automotive .. >> Hesai announces two revolutionary new ADAS .. WITRICITY RTI NXP BOSCH Follow us